Then if and have continuous first partial derivatives in a region (a condition which is in many cases stronger than necessary), we can define the following.
1. Gradient
The gradient of φ is defined by
An interesting interpretation is that if is the equation of a surface, then is a normal to this surface.
2. Divergence
The divergence of is defined by
3. Curl
The curl of is defined by
Note that in the expansion of the determinant, the operators , , must precede , , .
If is the vector joining the origin of a coordinate system and the point , then specification of the vector function defines , and as function of . As changes, the terminal point of describes a space curve having parametric equations , , . If the parameter is the arc length measured from some fixed point on the curve, then
is a unit vector in the direction of the tangent to the curve and is called the unit tangent vector. If is the time , then
is the velocity with which the terminal point of describes the curve. We have
from which we see that the magnitude of , often called the speed, is . Similarly,
is the acceleration with which the terminal point of describes the curve. These concepts have important applications in mechanics.
Limits, continuity and derivatives of vector functions follow rules similar to those for scalar functions already considered. The following statements show the analogy which exists.
The vector function is said to be continuous at if given any positive number , we can find some positive number such that is defined as
provided this limit exists. In case ; then
Higher derivatives such as , etc., can be similarly defined.
If , then
is the differential of .
Derivatives of products obey rules similar to those for scalar functions. However, when cross products are involved the order may be important. Some examples are:
If corresponding to each value of a scalar we associate a vector , then is called a function of denoted by . In there dimensions we can write .
The function concept is easily extended. Thus if to each point there corresponds a vector , then is a function of , indicated by .
We sometimes say that a vector function defines a vector field since it associates a vector with each point of a region. Similarly defines a scalar field since it associates a scalar with each point of a region.
Dot and cross multiplication of three vectors , and may produce meaningful products of the form , and . The following laws are valid:
in general
is volume of a parallelepiped having , , and as edges, or the negative of this volume according as , and do or do not form a right-handed system. If , and , then
The product is sometimes called the scalar triple product or box product and may be denoted by . The product is called the vector triple product.
In parentheses are sometimes omitted and we write . However, parentheses must be used in . Note that . This is often expressed by stating that in a scalar triple product the dot and the cross can be interchanged without affecting the result.
The cross or vector product of and is a vector (read cross ). The magnitude of is defined as the product of the magnitudes of and and the sine of the angle between them. The direction of the vector is perpendicular to the plane of and and such that , and form a right-handed system. In symbols,
where is a unit vector indicating the direction of . If or if is parallel to , then and we define .
//en.wikipedia.org/wiki/Vector_product
The following laws are valid:
If and , then
is the area of a parallelogram with sides and .
If and and are not null vectors, then and are parallel.
Note that communicative law for cross products is failed.
The dot or scalar product of two vectors and , denoted by (read dot ) is defined as the product of the magnitude of and and the cosine of the angle between them. In symbols,
Note that is a scalar and not a vector.
The following laws are valid:
Communicative Law for Dot Products
Distributive Law
where is a scalar.
If and then
If and and are not null vectors, then and are perpendicular.
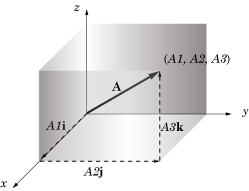
Any vector in 3 dimensions can be represented with initial point at the origin O of a rectangular coordinate system. Let be the rectangular coordinates of the terminal point of vector with initial point at O. The vectors , and are called the rectangular component vectors, or simply component vectors, of in the x, y and z directions respectively. , and are called the rectangular components, or simply components, of in the x, y and z directions respectively.
The sum or resultant of , and is the vector , so that we can write
The magnitude of is
In particular, the position vector or radius vector from O to the point (x, y, z) is written
The rectangular unit vectors , and are unit vectors having the direction of the positive x, y, and z axes of a rectangular coordinate system. We use right-handed rectangular coordinate system unless otherwise specified. Such systems derive their name from the fact that a right threaded screw rotated through 90° from Ox to Oy will advance in the positive z direction. In general, three vectors , and which have coincident initial points and are not coplanar are said to form a right-handed system if a right threaded screw rotated through an angle less than 180° from to will advance in the direction .
,
,
and
are assumed to exist, then
or
or
or
is called Laplacian of
is called Laplacian operator.
. The curl of the gradient of
. The divergence of the curl of
 = grad U + grad V")
 = div\bold{A} + div\bold{B}")
 = curl\bold{A} + curl\bold{B}")
 = (\nabla U)\cdot\bold{A} + U(\nabla\cdot\bold{A})")
 = (\nabla U)\times\bold{A} + U(\nabla\times\bold{A})")
 = \bold{B}\cdot(\nabla\times\bold{A}) - \bold{A}\cdot(\nabla\times\bold{B})")
 = (\bold{B}\cdot\nabla)\bold{A} - \bold{B}(\nabla\cdot\bold{A}) - (\bold{A}\cdot\nabla)\bold{B} + \bold{A}(\nabla\cdot\bold{B})")
 = (\bold{B}\cdot\nabla)\bold{A} + (\bold{A}\cdot\nabla)\bold{B} + \bold{B}\times(\nabla\times\bold{A}) + \bold{A}\times(\nabla\times\bold{B})")
 = \nabla (\nabla \cdot \bold{A}) - \nabla^2\bold{A}")
defined by
and
have continuous first partial derivatives in a region (a condition which is in many cases stronger than necessary), we can define the following.
is the equation of a surface, then
is a normal to this surface.
,
,
must precede
,
,
.
")
\phi\\ = \bold{i}\frac{\partial\phi}{\partial x} + \bold{j}\frac{\partial\phi}{\partial y} + \bold{k}\frac{\partial\phi}{\partial z}\\ = \frac{\partial\phi}{\partial x}\bold{i} + \frac{\partial\phi}{\partial y}\bold{j} + \frac{\partial\phi}{\partial z}\bold{k}\cdots(14)")
\cdot(A_1\bold{i} + A_2\bold{j} + A_3\bold{k})\\ = \frac{\partial A_1}{\partial x} + \frac{\partial A_2}{\partial y} + \frac{\partial A_3}{\partial z}\cdots(15)")
\times(A_1\bold{i} + A_2\bold{j} + A_3\bold{k})\\ = \left|\begin{array}{ccc} \bold{i} & \bold{j} & \bold{k} \\ \frac{\partial}{\partial x} & \frac{\partial}{\partial y} & \frac{\partial}{\partial z} \\ A_1 & A_2 & A_3 \end{array}\right| \\ = \bold{i}\left|\begin{array}{cc} \frac{\partial}{\partial y} & \frac{\partial}{\partial z} \\ A_2 & A_3 \end{array}\right| - \bold{j}\left|\begin{array}{cc} \frac{\partial}{\partial z} & \frac{\partial}{\partial z} \\ A_1 & A_3 \end{array}\right| + \bold{k}\left|\begin{array}{cc} \frac{\partial}{\partial x} & \frac{\partial}{\partial y} \\ A_1 & A_2 \end{array}\right|\\ = \left(\frac{\partial A_3}{\partial y} - \frac{\partial A_2}{\partial z}\right)\bold{i} + \left(\frac{\partial A_1}{\partial z} - \frac{\partial A_3}{\partial x}\right)\bold{j} + \left(\frac{\partial A_2}{\partial x} - \frac{\partial A_1}{\partial y}\right)\bold{k}\cdots(16)")

is the vector joining the origin
of a coordinate system and the point
, then specification of the vector function
defines
,
and
as function of
. As
,
,
. If the parameter
measured from some fixed point on the curve, then
, then
, often called the speed, is
. Similarly,
")
")
")
")
is said to be continuous at
if given any positive number
, we can find some positive number
such that
is defined as
; then
, etc., can be similarly defined.
, then
 - \bold{A}(u)}{\Delta{u}}\cdots (7)")

")
\ \frac{d}{du}(\phi\bold{A}) = \phi\frac{d\bold{A}}{du} + \frac{d\phi}{du}\bold{A}")
\ \frac{\partial}{\partial y}(\bold{A} \cdot \bold{B}) = \bold{A} \cdot \frac{\partial \bold{B}}{\partial y} + \frac{\partial\bold{A}}{\partial y} \cdot \bold{B}")
\ \frac{\partial}{\partial z}(\bold{A} \times \bold{B}) = \bold{A} \times \frac{\partial\bold{B}}{\partial z} + \frac{\partial\bold{A}}{\partial z} \times \bold{B}")
の微分は次のように定義される.
.
may produce meaningful products of the form
,
and
. The following laws are valid:
in general
is volume of a parallelepiped having
,
and
, then
is sometimes called the scalar triple product or box product and may be denoted by
. The product
is called the vector triple product.
. However, parentheses must be used in
. This is often expressed by stating that in a scalar triple product the dot and the cross can be interchanged without affecting the result.
 = \left|\begin{array}{ccc} A_1 & A_2 & A_3 \\ B_1 & B_2 & B_3 \\ C_1 & C_2 & C_3 \end{array}\right|\cdots (6)")
 \ne (\bold{A} \times \bold{B}) \times \bold{C}")
 = (\bold{A} \cdot \bold{C})\bold{B} - (\bold{A} \cdot \bold{B})\bold{C}\\ (\bold{A} \times \bold{\bold{B}}) \times \bold{C} = (\bold{A} \cdot \bold{C})\bold{B} - (\bold{B} \cdot \bold{C})\bold{A}")
")
")
(read
is defined as the product of the magnitudes of
is perpendicular to the plane of
is a unit vector indicating the direction of
or if
and we define
.
and
, then
is the area of a parallelogram with sides
and
")

 = \bold{A}\times\bold{B} + \bold{A} \times \bold{C}")
 = (m \bold{A}) \times \bold{B} = \bold{A} \times (m \bold{B}) = (\bold{A} \times \bold{B})m")



(read
is a scalar.
and
")

 = \bold{A}\cdot\bold{B} + \bold{A}\cdot\bold{C}")
 = (m\bold{A})\cdot\bold{B} = \bold{A}\cdot(m\bold{\bold{B}}) = (\bold{A}\cdot\bold{B})m")




be the rectangular coordinates of the terminal point of vector
,
and
are called the rectangular component vectors, or simply component vectors, of
.
")
")
")

,
and
are unit vectors having the direction of the positive x, y, and z axes of a rectangular coordinate system. We use right-handed rectangular coordinate system unless otherwise specified. Such systems derive their name from the fact that a right threaded screw rotated through 90° from Ox to Oy will advance in the positive z direction. In general, three vectors